 |
||
UAV-Image Process
Aerial dataset acquisition from UAS/UAV/Drones (Unmanned Aerial System/Vehicle) can be used for different purposes including DTM, contour generation, ortho mosaics, 3D models, DSM production, single building modeling or neighborhood modeling (city-scale modeling requires acquisition systems with more autonomy). Usage of an UAV is more economy compared to the conventional method of flying for aerial photography as it not only reduces expenses in procedures, it fetches required output much quicker. In general, UAV is used to fly for smaller areas of interest, where usage of expensive flying for aerial photography is avoided.
UAV images are generally EXIF ( Exchangeable Image File, a format that is a standard for storing interchange information in digital photography image files using JPEG compression). The images are geographically tagged with GPS coordinates . After Aerial Triangulation is performed GCPs are used to transform the automatically generated tie points to ground coordinate system. By iterative steps a desired accuracy can be obtained. The phases involved in processing of UAV images can be as follows:
UAV image process software does matching of points by image correlation method accurately.
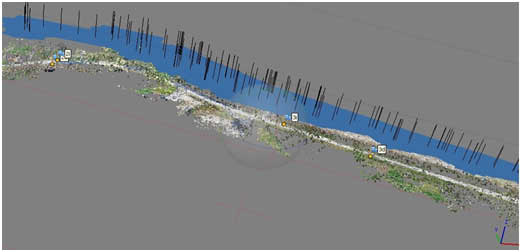
The derived photo coordinates of matched points and orientation provided by the UAV flying are used in a block bundle adjustment to reconstruct the exact position and orientation of the camera for every image. Thus a strip formation is done.
After this reconstruction of the matching points, their 3D coordinates are determined for each matched points.
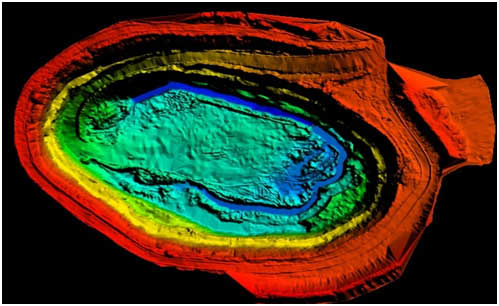
Three dimensional point cloud can be generated with the help of Triangulated Irregular Network (TIN) in order to obtain a DEM/DSM.
Generated DEM/DSM can further be accurately filtered after removing noise etc., to extract perfect terrain and digital surface model.
DEM can be used to generate ortho mosaic and to generate contours.
 |
 |